

A hőmérséklet-szabályozás a legismertebb automatika. A hőforrásból származó hő korlátozása alapján sok folyamatot lehet jól szabályozni. Egy kemence a bevezetett hőt környezetének adja át. Ezt a hőt veszteségnek nevezzük. A kemence akkor van egyensúlyban, amikor a veszteség megegyezik a bevezetett hővel. Az ilyen berendezést úgy szabályozzuk, hogy a fűtést kikapcsoljuk a szabályozón beállított hőmérsékletén. A kikapcsolás módját a szabályozóban lévő algoritmus határozza meg. Az ipari alkalmazásokhoz a leggyakoribb a PID algoritmus, amely a hőmérséklet lengését csökkenti.
Feltételeztük, hogy a kemence a beállított hőmérsékleten a kikapcsolás után hűlni fog. Mi van, ha ez a folyamat nem így működik? Sok berendezésben alacsony hőmérséklet van. A biológia termosztátok, a fitotronok csak különleges szabályozóval szabályozhatók, mert a hőveszteség kicsi, vagy egyáltalán nincs. Az ilyen készülék túlmelegszik és nem tud visszahűlni.
A folyamatok másik csoportjában hő keletkezik. A műanyag prés-szerszámban a bepréselt műanyag leadja hőjét és így a szerszám túlmelegszik. Bármilyen szünet miatt viszont a szerszám kihűl. Tehát ezt a folyamatot sem lehet egy egyszerű hőmérsékletszabályozóval szabályozni.
Vannak acélok, amelyeket lépcsőzetes edzéssel nemesítenek úgy, hogy a edzési hőmérsékletre hevített munkadarabot 500-600 °C-os sófürdőbe merítik. A sófürdő felmelegszik, ezért a következő edzéshez le kell hűteni. A műveletek között viszont lehűlhet, tehát melegíteni kell.
A kémiai folyamatok hőt termelhetnek, a technológia egyes szakaszaiban. Tehát a reaktorokat hol fűteni, hol hűteni kell.
Összefoglalva a példákon bemutatott jelenséget láthatjuk, hogy a hőmérsékletszabályozás bizonyos folyamatoknál fűtésből és hűtésből áll.
A feladatok sokfélesége miatt, sokféle megoldás létezik. Mindegyik megoldás közös vonása az, hogy:
- A szabályozott rendszernek 1 érzékelője van
- A szabályozott rendszert hőjét 2 két beavatkozó kapcsolja be és ki, amelyek közül az egyik fűt, a másik hűt
- A szabályozott rendszernek 1 alapjele van.
A szabályozás algoritmusa egyszerűnek látszik. Ha a készülék melegebb a szükségesnél, hűteni, ha hidegebb, fűteni kell. Természetesen nem minden egyszerű, ami annak látszik.
A nagy késleltetésű rendszereknél a szabályozás mindig lengésekkel jön létre. A "PID hangolás" című részben tárgyaltuk, miért kell PID szabályozást használni. Ugyanitt megállapítottuk hogy a PID paraméterek csakis a berendezés tulajdonságaitól függenek. Egy hőtechnikai berendezés PID paramétereit a geometriai méretek, a hőszigetelés és a fűtés teljesítménye és elrendezése határozza meg.
Ha ez igaz, akkor meg kell ismételnünk ezt a hűtési viszonyokra is. Azonnal látszik, hogy a kettő egymástól különbözik. A hűtés oldal "teljesítményé"-nek hatása más mint a fűtésé (természetesen lehet egyforma, az arányt a gazdaságosság és a technológiai követelmények határozzák meg). Nem bizonyítjuk, csak megjegyezzük, hogy a 3 paraméter közül csak a P különbözik, az I és D paraméter egyforma.
A fenti feladatot a követelményektől függően kétféleképen lehet megoldani. (A kikapcsolom-bekapcsolom módszert nem tárgyaljuk).
I. A hirtelen nagy hőmérséklet változást okozó nagy hőmennyiséget ALARM relével vezérelt hűtéssel vonjuk el. Ilyen folyamat a lépcsőzetes edzés, amely után a munkadarab által bevitt hőt ventilátorral befújt levegővel távolítjuk el a rendszerből. A műanyagpréselésnél a műanyagból elvont hőt az ALARM relével vezérelt hűtővíz mágnesszelep nyitásával vonjuk el. Hasonlóképen vezérelt hűtőeszközöket használhatunk a vegyipari folyamatoknál, ha gyors változásokat kell visszaállítani.
A szabályozóban a szelepet vezérlő ALARM-ot eltérésre (deviation) kell konfigurálni. Például az alapjel felett 10°C-kal akarjuk a hűtést indítani. Konfiguráljuk az ALARM-ot eltérésre és adjunk neki 10 értéket. A szabályozó PID tulajdonságokkal 600°C-on fogja a kemencét tartani és a hőbevitel után 610°C-on fogja hűtést indítani. A hűtés hatására a kemence lehűl és az ALARM-ra beállított hiszterézistől függően a szabályozó a hűtést kikapcsolja. A PID algoritmus eddig nem kapott helyes információt, ezért a beavatkozójel valószínűleg nem felel meg a rendszer állapotának. Általában néhány lengés után után helyreáll a PID szabályozás.
Az ALARM relével működő HŰT-FŰT szabályozás blokk vázlatát 26. ábrán láthatjuk.
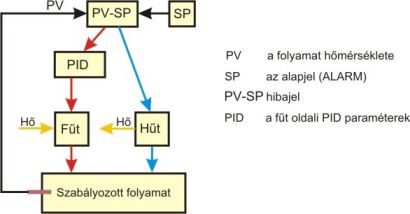
Jól látható, hogy egy ON-OFF szabályozás és egy PID szabályozás váltogatja egymást az alapjel környezetében. Váltások mindig zavarójelet gerjesztenek, ezért ezt a szabályozást, csak hirtelen nagy változásoknál lehet használni. Ezek a változások általában nagyságrenddel nagyobbak a váltás okozta zavarójelnél, így alig érzékelhetők.
II. Hogy a fűtés és hűtés közötti váltásnál ne legyen zavarójel (ne gerjedjen a rendszer) egy szabályozóban két PID szabályozási hurkot kell használni. A PID paraméterek előbb említett problémája itt jelentkezik. A szabályozó az adott pillanatban kiszámítja a beavatkozójelet, amely valamilyen irányban eltolja a rendszert. Ha ettől a rendszer a beavatkozót váltja, a beavatkozójel csak a helyes értékkel és iránnyal változhat meg. A bevezetőben leírt fűtés/hűtés erősséget figyelembe kell venni. Ha ez a hányados, a "C" állandó helyes, a váltáskor nem keletkezik zavarójel. A 27 ábra a két szabályozási hurok működését szemlélteti.
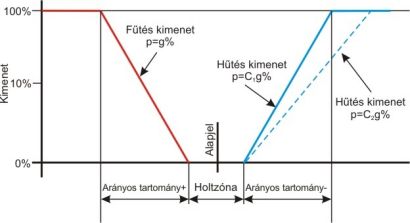
Az alapjeltől balra ábrázoltuk a fűtési oldal arányos tartományát (+). E szerint az alapjeltől távoli végponthoz 100%-os, az alpjelhez közel 0%-os beavatkozójel tartozik. Az alapjel nem egy érték, hanem egy tartomány. Ez a tartományt (holtzóna) a szabályozott rendszer tulajdonságai alapján kell meghatározni. A tartomány lehet pozitív, 0 és negatív. A számértéktől függ az átmenet a hűtés és a fűtés között. Pozitív érték esetén a tartományban egyik beavatkozó sem működik. 0 értéknél egyik beavatkozó sem működik, de a legkisebb eltérésre azonnal bekapcsolnak a PID által kiszámított %-kal. A negatív érték esetén a mindkét beavatkozó a PID szerint működik. Ez felesleges energiafogyasztással jár, de szükséges lehet nagyon pontos szabályozásoknál.
Az alapjeltől jobbra látható a hűtő szabályozó arányos tartománya (-). Ez a szabályozási kör értelemszerűen úgy működik mint a fűtő szabályozási kör. Az eltérés a erősítési tényezőben van. Ha fűtőkör erősítése g%, akkor a hűtőköré C.g%, ahol C>0. Tehát a C tényező határozza meg az arányos tartományok határát.
Minél nagyobb az erősítés, annál szűkebb az arányos tartomány. Nagy értéket állítva a hűtőt ON-OFF szabályozási módra lehet állítani, amely hasonló eredményt ad mint az ALARM relés HŰT-FŰT szabályozás. Előnye ennek viszont az, hogy nem kell az ALARM relét állítgatni és az átmenet simább lesz.
A HŰT-FŰT szabályozó blokkvázlata a 28. ábrán látható.
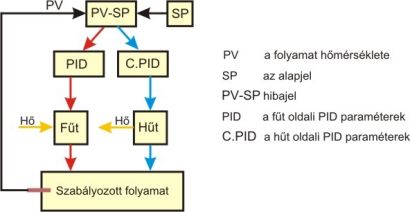
Jól látható, hogy két egyenértékű PID szabályozó működik két szabályozási hurokban. A két szabályozónak közös alapjele és közös bemenenőjele (érzékelője) van. A szabályozó a két beavatkozót a közös hibajel szerint működteti.
A jó szabályozóban a paramétereket önhangolással lehet megállapítani. Sőt a legjobbak a C tényezőt és a periódusidőket is meghatározzák. A HŰT-FŰT szabályozás behangolása még így sem egyszerű feladat. Viszont ha a szabályozó igazán korszerű, akkor van kommunikációs interfésze. A számítógépen megjelenített regisztrátum (természetesen a beavatkozási értékek ábrázolásával) nagyon megkönnyíti a hangolást.
Befejezésül még egyszer meg kell említeni az energiafogyasztást. Nagy fogyasztású rendszereknél körültekintően kell eljárni. Nagyon illetlen dolog feleslegesen hőt vezetni egy rendszerbe és utána azt energiafelhasználással elvonni.
Kapcsolódó anyagok: