

1. Miért PID?
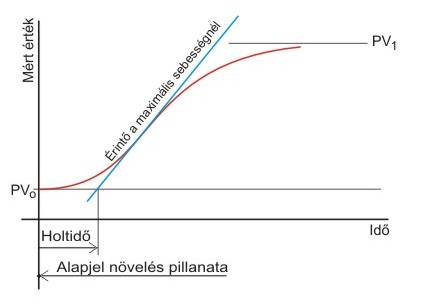
A szabályozók beállításánál általában a PID tulajdonságok megértése és beállítása okoz problémát. Azt, hogy egy hűtő-ventilátor 150 °C-nál induljon el és 170 °C-nál szólaljon meg egy csengő, könnyen megértjük. Viszont hogyan értelmezhetjük azt, hogy a pizzasütő kemencében 175 °C van akkor, amikor kinyitjuk annak ajtaját és 30 másodperc múlva becsukjuk és a becsukás pillanatában még mindig 175 °C a hőmérséklet. Kis idő eltelte után a hőmérséklet elkezd csökkenni és a fűtés ellenére tovább csökken egy minimális értékig, majd néhány lengés után visszaáll a beállított értékre. A jelenség oka az, hogy a hő terjedéséhez idő szükséges. A szabályozó nem tudhatja biztosan hogy érzékelője milyen adatot továbbít a központi számító egységébe. Hiszen amikor kinyitottuk a pizza-sütő ajtaját, akkor már abban a beáramló hideg levegő lecsökkentette a hőmérsékletet és "hőhiány" keletkezett. Az érzékelő ezt csak később továbbítja a szabályozónak. A késlekedést a folyamat holtidejének nevezzük. A holtidő grafikus meghatározását az 19. ábra szemlélteti. A matematikai meghatározás szerint a holtidő az az idő, az egyensúlyi állapottól számítva, amely az új alapjel (cél érték) 63,2 %-ának [(1-1/e)*100] eléréséhez szükséges 100%-os kimeneti érték mellett. (A holtidő a rendszer energiaállapotától is függ. Pl.: egy kemence holtideje más 20 °C-on, mint 1200 °C-on.)
Minél nagyobb egy folyamat holtideje annál bizonytalanabb a szabályozás. A holtidő a folyamat fizikai tulajdonsága, amely a berendezés megtervezése és megvalósítása folyamán jön létre. Ugyanolyan tulajdonság, mint a berendezés tömege, a színe, az alakja, stb. Csak konstrukciós változtatással lehet megváltoztatni. Tehát a folyamat szabályozhatósági tulajdonságai nemcsak a szabályozótól, hanem a folyamatot megvalósító géptől is függenek.
Az automatikus, szabályozott gép konstrukciójával kapcsolatban csak annyit érdemes megjegyezni, hogy remélni lehet, a tervező rendelkezett szabályozástechnikai ismeretekkel. Ez bizalmi kérdés, csak megfelelő referenciával rendelkező cégtől célszerű berendezést vásárolni.
A szabályozó kiválasztása sem egyszerű feladat. A szabályozó ára nem jellemző tulajdonság. Lehet drágán vásárolni a célnak nem megfelelő műszert. A szabályozási tulajdonságok és az ipari környezeti tűrőképesség legyen a legfőbb szempont a kiválasztásnál. Mivel a felhasználó nem láthatja ezeket a tulajdonságokat csak a prospektusok alapján dönthet. Tehát ez is olyan bizalmi kérdés mint a gép megvásárlása.
A bonyolult szabályozók telepítése sokszor a szakembereknek is gondot okoz. A szabályozó gombjait kétségbeesetten nyomkodó üzembe-helyező rádiótelefonján felhívja a forgalmazót, hogy segítséget kérjen. Nem mindegy, hogy ilyenkor ki van a vonal másik végén! Erre is gondoljon amikor szabályozót vásárol.
Ma már nincs "egyszerűen" beállítható szabályozó. Ne keressen ilyent, mert ha véletlenül van, az a múlt század technikája. Az igazi szabályozó bonyolultan állítható be és rendkívül egyszerűen kezelhető. Nyomjon meg egy gombot Ţ a folyamat elindul. Nyomjon meg egy gombot Ţ a folyamat megszakad.
2. A hangolás és a PID paraméterek
A PID paraméterek határozzák meg a szabályozás minőségét. A legegyszerűbb szabályozók, az állásos szabályozók, amelyek a szabályozott jellemzőt (hőmérséklet, nyomás, villamos áram, villamos feszültség, stb) összehasonlítják az alapjellel és annak elérésekor kikapcsolják a kimenetet, majd megvárják míg a szabályozott jellemző a túllendülés után újra lecsökken az alapjel értékére és bekapcsolják a kimenetet. Mivel a gyakorlatban előforduló rendszereknek holtidejük van (az érzékelő csak késve tudja a szabályozott jellemzőt mérni), a szabályozás lengésekkel jön létre. Minél nagyobb a holtidő és minél erősebb a beavatkozás, annál nagyobb a lengések mértéke. Vannak rendszerek, amelyek technológiai tulajdonságait ezek a lengések teljesen lerontják. így nem szabad állásos szabályozót használni azokhoz a technológiákhoz, amelyeknél a szabályozott jellemző pontos tartása fontos. Ilyen technológia a hőkezelés, de különösen a kerámiák, a fémek és műanyagok hőkezelése. Laboratóriumokban elemzés előtt a szerves anyagokat elhamvasztják. Az alacsony és a magas hőmérséklet egyaránt meghamisítja az elemzési eredményt.
A korszerű szabályozott rendszereket igen nagy energiatartalékokkal gyártják. Ez teszi lehetővé a széleskörű alkalmazhatóságot. A nagy energiatartalék viszont a szabályozhatóságot rontja. Ezért korszerű berendezést csak korszerű PID szabályozóval lehet szabályozni. Minden más szabályozó csak rángatja a rendszert, a szabályozott jellemző a legképtelenebb értékeket veheti fel.
A korszerű szabályozó korszerű PID algoritmussal rendelkezik, amely a szabályozó minden állapotában, minden zavarójel hatását a legrövidebb idő alatt megszünteti és PID paramétereitől függően a túllövést korlátozza.
A "P" szabályozó
Vizsgáljuk meg a P szabályozókat, amelyek a szabályozott jellemzőt (tulajdonságot: nyomást, hőmérsékletet, sebességet, stb) az alapjel környezetében arányosan szabályozzák úgy, hogy a kimenetet a tartomány alsó határán 100 %-ra, felső határán 0 %-ra állítják be. Ezt a szabályozást fordított szabályozásnak nevezzük. Az egyenes szabályozásnál a határértékek felcserélődnek. A fordított szabályozást fűtésre, az egyenes szabályozást hűtésre lehet használni. Ezek a szabályozók az alapjel értékénél a kimenetet 50%-ra állítják be (léteznek olyan szabályozók is, amelyeknél az alapjel 0%-nál van). Természetesen csak véletlenül létezik olyan rendszer, amely az alapjelnél pontosan 50%-os (vagy 0%-os) kimenetet igényel. Azok a rendszerek, amelyek ennél kisebb kimeneti értéket igényelnek túllendülnek és tartósan így maradnak. Ennek fordítottja is érvényes. Minél nagyobb a szabályozási arányossági tartomány az eltérés annál nagyobb.
Vizsgáljuk meg hogyan szabályozza a P szabályozó a kemencét. Például egy 600 °C-ra beállított 100 kW-os kemencébe az alapjelnél a szabályozó 50 kW teljesítményt vezet be. A 20 ábra szerint, ha az említett kemence lényegesen kevesebb (~30 kW) teljesítménnyel tartható 600 °C-on, a szabályozó arányosan addig növeli a hőmérsékletet, ameddig szerinte a kimenet 30 % (30 kW) nem lesz. Az arányos tartománytól függően ez az érték legyen például 53 °C. A kemence tehát 653 °C-os lesz és tartósan így marad. Ez az eltérés az OFFSET. A kemencék szabályozásánál az OFFSET a hőntartás folyamán változik, mert a hővel való telítődés miatt egyre kevesebb teljesítmény szükséges. Tovább romlik a helyzet akkor, mikor az alapjelet (a beállított hőmérsékletet) váltakozóan felűlről, vagy alúlról közelítjük meg. Ebből következik, hogy P, PD szabályozót ilyen szabályozásokhoz nem célszerű alkalmazni.
P és PD szabályozást ott kell alkalmazni ahol az szükséges. A korszerű PID szabályozó I tagjának kikapcsolása után PD szabályozó lesz. Nem érdemes tehát PD szabályozót vásárolni egy PID szabályozó árán. Ma csak azok a szabályozók PD jellegűek, amelynek algoritmusát a tervező nem tudta megírni.
Az ilyen szabályozók használati útmutatójában különböző tanácsokat adnak a jelenség kiküszöbölésére, amelyek oda vezetnek, hogy a felhasználó kénytelen a szabályozási tartományt lecsökkenteni és így egy állásos szabályozót használni. Az állásos szabályozó a kimenetet ki-be kapcsolgatja és ezért az alapjel körül leng. A másik módszer az, hogy gyakorlati tapasztalatok alapján az OFFSET értékét egy beállítható állandóval próbálják csökkenteni. Ez természetesen minden folyamatnál egy meghatározhatatlan hibát okoz, mert az OFFSET nem az alapjeltől, hanem a rendszer energiaállapotától függ. Másként alakul az OFFSET egy telerakott kemencénél, mint egy üresnél.
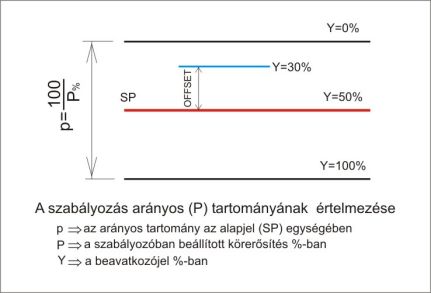
Az 20. ábra jól látható a P szabályozó hibája. A rendszernek, egyensúlyi állapotához, a rendelkezésre álló teljesítmény 30%-a van szüksége, de a P (arányos, vagy proporcionális) szabályozó az alapjelnél 50%-ot vezet be a folyamatba.
Az "I" (integráló) hatás
Az OFFSET hiba kiigazítása az integráló tag feladata. Az integráló tag a szabályozónak az a része (a szoftverben) amely megméri az OFFSET-et és a beállított integrálási időnek megfelelően azt úgy változtatja meg, hogy az megszűnjön. Tehát negatív OFFSET esetén hozzáad, pozitívnál levon. Az integrálási időt a szabályozó PID paraméter beállító helyén kell megadni. A szabályozó a beállított integrálási idő alatt az OFFSET abszolút értékét 1 egységgel csökkenti, vagy növeli. Az integráló tag nagy integrálási idő esetén az OFFSET értékét lassan csökkenti, ezért az alapjelet lassan közelíti meg. A lassú megközelítés miatt jól követi az OFFSET esetleges változásait, ezért nyugodt, de lomha szabályozást eredményez. Minél nagyobb a holtidő annál nagyobb integrálási idő szükséges. Ebből következik, hogy nagy holtidejű rendszereket általában lomhán lehet szabályozni. Minden zavarójel miatt beálló eltérést a szabályozó csak lassan tud visszaállítani.
Rövid integrálási idő gyors beállást eredményez, de a holtidő miatt az integráló tag az OFFSET-et az ellenkező oldalon újra létrehozza. Emiatt a rendszer szabályozott jellemzője túllendül az alapjelen (túllövés). Az integrálási időtől függően ez a lengés lehet csillapodó, állandó és sztochasztikus (szabálytalanul lengő).
A megfelelő integrálási idő meghatározását a később tárgyaljuk.
A "D" (differenciáló, vagy deriváló) hatás
Az OFFSET megszüntetéséhez feltétlenül szükséges az I tag. Az I tag viszont általában az indokoltnál jobban lassítja a beállást. Ahhoz, hogy a lengések csökkenjenek nagy integrálási időt kell választani. A lassú beállás a gyakorlatban ritkán engedhető meg. Tehát a beállást meg kell gyorsítani. Ezt a gyorsító (szükség esetén lassító) hatást a D tag valósítja meg. A gyakorlatban a D tag "extra lökést" ad a folyamatnak ott, ahol az szükséges.
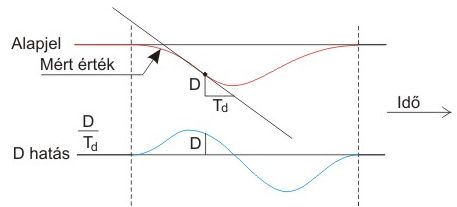
A D tag a folyamat hibajelének (hibajel = alapjel - mért érték) változása arányában csökkenti, vagy növeli a kimenetet. Tehát gyors változás estén erősen, lassú változás estén gyengén. állandó eltérés estén a deriváló hatás nulla. Más szavakkal a D tag hirtelen nagy változások hatását csökkenti. Hőmérsékletszabályozásnál a hirtelen hűlést fokozott fűtéssel, hirtelen melegedést a bemeneti érték gyors csökkentésével ellensúlyozza. A deriválási időt a szabályozóban be kell állítani. Ezen idő alatt a szabályozó a változást méri és a mért értéktől függően avatkozik be. A deriváló hatást a 21. ábra szemlélteti. A mért érték változási sebessége tulajdonképpen a pillanatnyi állapothoz tartozó érintő meredeksége. Az érintő és az időtengely által bezárt szög előjele a változás irányát mutatja. Jól látható, hogy minél meredekebb az érintő és minél nagyobb a deriválási idő, annál erősebb a kimenetre gyakorolt deriváló hatás. Azt, hogy a D tag a kimenetet csökkenti, vagy növeli az érintő szögének előjele határozza meg. Az időtengellyel párhuzamos érintő 0, az erre merőleges végtelen nagy hatást okoz.
PID hatás
A szabályozó "szerkezetének" ismertetése után vizsgáljuk meg annak működését. Nyilvánvaló, hogy ha a szabályozó úgy működne mint egy autó, elegendő lenne megtanulni melyik pedált mikor kell lenyomni és a kormányt a kanyarodáskor merre és mennyit kell elfordítani. Sajnos a szabályozó nem így működik. Az autós hasonlatnál maradva képzeljük el, hogy minden kanyarodás előtt (amelynek irányát az adott pillanatban nem is ismerjük) a gázpedált, a fékpedált egy bonyolult számolással megállapított értékig kell lenyomni. A számítás menetét 3 kísérletileg megállapított matematikai egyenlet írja elő.
A szoftver tartalmazza a helyes szabályozáshoz szükséges matematikai képleteket. A szabályozó telepítése és beállítása (konfigurálása) folyamán kell meghatározni a szabályozás be és kimeneteit, tulajdonságait és a P I D tagok állandóit, a paramétereket. A P, I és D tagok működése egyenként jól érthető, de azokat sajnos nem lehet akárhogyan együtt használni. Ha mind a három paramétert úgy adnánk meg, hogy a "józan eszünkre hallgatva" a leggyorsabb és a legpontosabb szabályozást kapjuk, megdöbbenve tapasztalnánk, a szabályozott rendszer a legképtelenebb értékeket venné fel.
Mint már említettük a szabályozott rendszer viselkedését a szabályozási körben lévő összes elem holtideje és a mért értéket (szabályozott jellemző) befolyásoló beavatkozó jel (fűtés, hűtés, anyagáramlás, feszültség, áram, stb) erőssége határozza meg. A könnyebb megértés érdekében vegyük példaként a szabályozott kemencét. A kemence viselkedése attól függ egy adott hőmérsékleten, hogy mekkora a holtideje és mennyi az a fűtési tartalék, amellyel az egyensúly fenntartásához szükséges mennyiségen túl rendelkezik.
A szabályozási körben lévő szabályozó és a beavatkozók holtideje elhanyagolható a különlegesen gyors folyamatok kivételével. Ezek szerint, mint azt már említettük a szabályozott rendszert kizárólag a konstrukciója határozza meg. A rendszer tehát már előre meghatározott, optimális működését semmilyen szabályozóval nem lehet javítani. Ezt úgy kell érteni, hogy egy rendszert valaki egy tökéletesen működő PID szabályozóval működtet, azt egy másik tökéletesen működő PID szabályozóval már nem lehet tovább optimalizálni. Ennek ellenkezője is igaz, ha egy rendszert tökéletlen szabályozóval akármilyen módon optimalizálva működtet, mindig lehet javítani egy tökéletesen működő PID szabályozóval. A tökéletes PID szabályozó matematikai képleteken alapján megírt szoftver szerint működik, amelyet a dinamikus viselkedést javító programrészletek egészítenek ki.
A PID szabályozó csak megfelelően beállított paraméterek esetén működik jól. A PID paramétereket mindig az adott technológiához kell meghatározni, mert a szabályozási túllendülés és a beállási idő összefügg egymással. Nagyon kis túllendüléshez hosszabb beállási idő szükséges.
A PID paraméterek beállítását hangolásnak (angolul: tune) nevezzük. A hangolás az az eljárás, amelynek segítségével meghatározzuk a technológia szempontjából legjobbnak ítélt paramétereket.
Mielőtt a hangolást ismertetnénk, a P, I és D tagok hatásait az 1. táblázatban foglaljuk össze külön működés esetén. Ezeket a tulajdonságokat a finomhangolásnál fogjuk használni.
A hangolás valamelyik ismert hangolási módszer alkalmazásával kezdődik.
Egyszerű eljárás a Ziegler-Nichols (frekvencia válasz) módszer, amely a szabályozott rendszer kritikus állapotát keresi meg. Kritikus a rendszer állapota akkor, amikor a lengések csillapodni kezdenek a szabályozási tartomány növelése (az xp erősítés csökkentése) folyamán. Ehhez a szabályozót állásos szabályozóvá alakítjuk. Elindítjuk a szabályozást azzal az alapjellel, amelynek környezetében akarunk hangolni. Az alapjel értékét elérve jól mérhető állandó lengéseket kapunk. Várjunk meg néhány lengést és mérjük meg a lengés periódusidejét (két maximum, vagy minimum, vagy alapjel közti idő) és maximális valamint minimális értékét.
Ezután állítsunk be egy arányos szabályozót. Az arányos tartomány erősítése %-ban (hurokerősítés) 0...99,7 lehet. Az arányossági erősítés annyit jelent, hogy 1 körüli érték széles tartományt, 50-nél nagyobb érték nagyon szűk tartományt jelent. A 0 érték különleges, mert ezzel az arányossági tartomány megszűnik. Az arányossági tartomány értéke az alapjel egységében 100/xp%, tehát 5%-os érték hőmérsékletszabályozásnál 100/5=20 °C és ez az alapjelre szimmetrikusan helyezkedik el (van nem szimmetrikus is). Ennek alapján a gyakorlati tapasztalatok szerint a hangolási érték 1-50% között várható.
Az arányos szabályozón megmért lengések állandósulása után állítsunk 50-100 közti értéket és ismételten mérjük a lengéseket. Az xp értékét csökkentve mindig mérjük a lengéseket. Célszerű az állításokat felezni pl.: 80 40 20 10. A mérések folyamán lesz egy olyan lengés, amely csillapodik, vagyis a maximumok és a minimumok csökkennek. Ennek a környezetében (valószínűleg ez, vagy a megelőző érték, vagy a kettő közötti) találjuk meg a kritikus állapotot, amelynek mért értékéből a kezdeti PID paraméterek az alábbiak szerint számolhatók ki (a kritikus P tag értéke = xpk és a kritikus lengésidő = Tk):
xp = 0,6 * xpk Ti = 0,5*Tk
Td = Ti / 4...8
A képletekben xp (P tag) a hurokerősítés %-ban
Ti (I tag) az integrálási idő
Td (D tag) a deriválási idő
A hangolás pontossága a szabályozott rendszertől függ. Előfordul, hogy a kapott érték azonnal használható, de gyakran kell a hangolást pontosítani . A képletek szerint kapott értékeket és a hangoláskor használt alapjelet állítsuk be és kapcsoljuk be a szabályozót. A szabályozott jellemzőt megfigyelve a szabályozó beállásakor az alábbiak szerint módosítsuk a PID paramétereket:
- Az alapjelet a szabályozó lengésekkel közelíti meg. A lengések csillapodnak. Az első lengés nagy túllendüléssel kezdődik. Növeljük a Ti és Td értékét addig ameddig a lengések nem szűnnek meg. Minden állítás után zavarójelet kell mesterségesen előidézni, hogy a szabályozott jellemző pillanatnyi értéke a szabályozási (arányossági) tartományon kívülre kerüljön. Ezt a módszert kell követni minden új érték kipróbálásánál, mert csak azok a beállások jellemzőek, amelyeknél a pillanatnyi érték a szabályozási tartományon kívülről indul.
- Az alapjelet a szabályozó alulról nagyon lassan közelíti meg lengések nélkül. Csökkentsük a Ti és Td értékét addig, amíg a megközelítés megfelelő nem lesz. Az előbbiek szerint a szabályozó I és D paramétere jól meghatározható. A két paraméter hányadosa általában 4-8 között van, de szélsőséges estekben ettől eltérhet (4-10). A D tag növelése a megközelítés sebességét csökkenti, nagyobb értéknél lassúbb a megközelítés. Az I tag a lengések visszaállási idejét növeli, nagyobb I tag esetén a lengések maximuma és minimuma lassabban közelíti az alapjelet. A két érték együtt hat a szabályozóra, ezért sok kísérlet szükséges az optimális hányados megkereséséhez.
- Az alapjelet a szabályozó egy túllövés után nagyon lassan közelíti meg, esetleg néhány lengést is észlelünk. Növeljük az xp értékét addig, ameddig a túllövés a megengedett értékre nem csökken és a lengések megszűnnek.
- Az alapjelet a szabályozó alulról szabálytalan lengésekkel közelíti meg. Csökkentsük az xp értékét addig, ameddig a lengések megszűnnek és a beállás a megfelelő lesz. Az xp értékét célszerű pontosan meghatározni, mert szabályozó beállásának jellegét alapvetően befolyásolja. Ezért feltétlenül ellenőrizni kell a megfelelőnek ítélt értéket egy nagyobb és egy kisebb érték kipróbálásával. általános szabály, hogy a gyors visszaállás érdekében a szabályozási tartomány a lehető legszűkebb legyen, de a lengések a technológia által megszabott határok között maradjanak. Azt a tulajdonságot amely ezt lehetővé teszi a szabályozó robusztusságának nevezzük. A robusztusság a szabályozó szoftverének tulajdonsága.
A hangolást nagyon megkönnyíti egy regisztráló, vagy kommunikáció.
A HAGA Automatika Kft. szabályozói kommunikálnak számítógéppel. A folyamatosan látható állapot szerint a finomhangolás igen egyszerű feladat.
3. Az önhangolás (Autotune)
A hangolási eljárásokat is lehet automatizálni. A szabályozó szoftverje alkalmas lehet a PID paraméterek meghatározására. A hangolási módszerek sokfélesége miatt nincsen egyedül üdvözítő módszer, mert nincsen varázsképlet. A jó önhangoló szoftver robusztus szabályozáshoz határozza meg a paramétereket. Természetesen az önhangoló módszerekből adódóan a nagyon gyors és nagyon lomha szabályozásoknál nem támaszthatunk szigorú követelményeket.
A HAGA Automatika Kft. szabályozói olyan önhangoló algoritmussal rendelkeznek, amelyek igen jó közelítéssel adják meg a paramétereket és a finomhangolás után tökéletesen szabályoznak.
4. PID szabályozás felsőfokon
Azt már tudjuk, hogy azok a rendszerek, amelyek tulajdonságaikat az alapjel nagyságától függőn változtatják, nem szabályozhatók jól ugyanazzal a paraméterkészlettel. A könnyebb érthetőség kedvéért vizsgáljunk meg egy korszerű kemencében lejátszódó folyamatot. A kemence falvesztesége exponenciálisan növekszik mert hőszigetelése szálas-anyagból van és ennek ez fizikai tulajdonsága. A felfűtés folyamán, ezt a hátrányát ellensúlyozza az, hogy kis hőtároló-képessége miatt a falban kevés hőt tárol. A két változó tulajdonság együttes eredményeként a holtidő és a melegedési sebesség jelentősen változik a felfűtés folyamán. A korszerű konstrukciós elvek alapján a kemencébe annyi fűtési tartalékot építenek be, amennyi csak belefér, hiszen ez nem okoz gazdaságtalan fogyasztást, mert a szabályozó ezt optimálisan korlátozza (ha az eléggé robusztus). A kemence hőérzékelőjének holtideje is hozzászámítódik a rendszer holtidejéhez, de ennek változása a lineáristól a 4. hatványig terjed. Természetesen egy ilyen kemencét 1 PID készlettel nem lehet jól szabályozni. Különösen igaz ez akkor, amikor a hőmérsékletet megadott program szerint kell szabályozni.
Vizsgáljuk meg hogyan lehet egy rendszert tökéletesen szabályozni.
- Vásároljunk olyan szabályozót, amely a teljes tartományban az optimális PID paraméterek szerint szabályoz. Egy korszerű szabályozó 10 PID paraméter készletet is képes tárolni. így a teljes tartományt 10 részre bontva 10 paraméterkészletet használ. A jó szabályozó mind a 10 paramétert önhangoló algoritmusával meg tudja határozni.
A KD9 szabályozó program üzemmódban is meg tudja választani a programlépéshez (program szegmens) tartozó PID paraméterkészletet. Ebből a 10 készletből bármelyik programlépéshez akármelyik készlet kiválasztható. Ez a lehetőség a szabályozás bármelyik pillanatában, a rendszer tetszésszerinti állapotában optimális PID paramétereket biztosít. A ilyen működést szakértői (expert) szabályozásnak nevezhetjük, mert szigorúan követi a technológiai követelményeket úgy, mintha egy szakértő irányítaná azt. Ahol finoman és lassan kell szabályozni ott lassan és finoman szabályoz, ahol durván kell szabályozni ott durván avatkozik be.
Legyen erre is példa egy kemence. A kovácsoláshoz használt kemence bélése nagyon kemény anyagokból épül, hogy a durva mechanikai igénybevételnek ellenálljon. Az ilyen kemence viszont nagyon érzékeny a gyors hőmérsékletváltozásokra, ezért felfűtéskor a kemence gázégőinek teljesítményét nagyon vissza kell fogni. A programszabályozó felfűtési szegmensébe olyan PID paraméterkészletet hívunk be amely csak nagyon lassan nyitja a gázszelepet és egyáltalán nem gerjeszt lengéseket. A kovácsolás közben a behelyezett hideg anyag gyorsan lehűti a kemencét és ezzel szélsőséges állapotot hoz létre. Ennek az állapotnak a lehető legrövidebb idő alatt meg kell szűnnie, ezért durva beavatkozásra van szükség. Tehát a program kovácsolási időre vonatkozó szegmensébe az előzőhez képest sokkal durvábban beavatkozó PID készletet hívunk be, amely a gázszelepet gyorsan a szükséges mértékben nyitja és a hőmérséklet helyreállásakor zárja.
- A PID szabályozás hatását fokozni lehet a program szerinti szabályozással. A szabályozó dinamikus (nem egyensúlyi) viselkedését egyértelműen az érvényes PID paraméter-készlet határozza meg. Mivel ez a rendszerhez kötött tulajdonság, közvetlenül nem tudjuk befolyásolni. Az alapjel megváltoztatásával viszont a rendszer másik állapotba kerül. Ezt is egy példán lehet bemutatni. Legyen a rendszer mért értéke 100, az alapjel 600, az arányossági tartomány 50. A szabályozás elindítása után a rendszer 100%-os kimenettel kezd és ezt 600-25=575 alapjelig így fut. Innen a PID tulajdonságok szerint eléri az alapjelet és tételezzük fel, hogy túllövéssel áll be. Ha ez a túllövés káros, megváltoztatjuk a PID paramétereket és így megszüntetjük a túllövést. Ez a paraméterkészlet viszont a beállást nagyon lelassítja, amely szintén káros a folyamatra. A problémát csak programszabályozással lehet megoldani. írjunk programot az elérés gyorsítása érdekében. Első programlépés engedje meg, hogy a szabályozó 100%-os kimenetet határozzon meg mondjuk 550 alapjelig. A következő programlépés lehet egy korlátozott alapjel-változás (ramp) egy erősen ható PID készlettel 575 alapjelig. A hátralévő részt az előzőhöz hasonlóan, de finoman működő PID készlettel hajtsa végre a szabályozó. Helyesen megválasztva a programot, így tetszésszerinti szabályozást tudunk létrehozni. Tehát a hagyományos matematikai egyenleteken alapuló szabályozási eljárást úgy alkalmazzuk, hogy a folyamatot tetszés szerinti időtartamokra bontjuk és ezeket, az időtartamok alatt optimálisan szabályozunk.
- A fentiekből következik, hogy a PID szabályozást a különleges szabályozók alkalmazása estén újra kell értékelni. A hagyományos PID szabályozók a rendszert a olyan matematikai képletek alapján szabályozták, amelyeket bizonyos peremfeltételekkel módosítottak Ezek közül a legismertebb a túllövést csökkentő algoritmus. A korszerű mikroprocesszoros konfigurálható programszabályozó ugyanazokat a matematikai képleteket használja, de képes a folyamatot részekre bontani. Ezek a részek külön optimalizálhatók, tehát az egész folyamat is optimalizálható.
A PID szabályozás részletes ismertetése után ismét vissza kell térnünk oda ahonnan elindultunk. Szabályozni kellene a lehető legjobban egy folyamatot. Láttuk, hogy a megfelelő eszköz nélkül ez reménytelen vállalkozás. Néhány szempont a megfelelő eszköz kiválasztásához:
- Minden szabályozáshoz PID szabályozót célszerű választani.
- Összetett, sok feladat ellátására alkalmas szabályozót gazdaságos választani, mert ha a technológia esetleg egy új feladat megoldását kívánja, egyszerűbb azt néhány gombnyomással elintézni, mint egy új eszközt vásárolni és működését megtanulni.
- Ne vásároljon a szokásostól eltérő szabályozót, mert a PID szabályozó tulajdonságait semmilyen barkácsolással nem lehet utánozni. Ha egy szabályozóban különleges számértékeket kell beállítani, az nem PID szabályozó!
- Az összetett, sok feladat megoldására alkalmas PID szabályozó kezelése nem bonyolultabb, mint egy korszerű háztartási gép. Ne higgye el, hogy azért kell primitív szabályozót vásárolnia, mert Ön nem tud egy korszerű szabályozót kezelni! Nyilván nem azért vásárol egy öreg Trabantot, mert nem tudna egy új Mercedest vezetni. érdemes elgondolkozni azon, vajon miért hangsúlyozzák Önnek, hogy a felajánlott szabályozó nagyon könnyen kezelhető.
Kapcsolódó anyagok: